
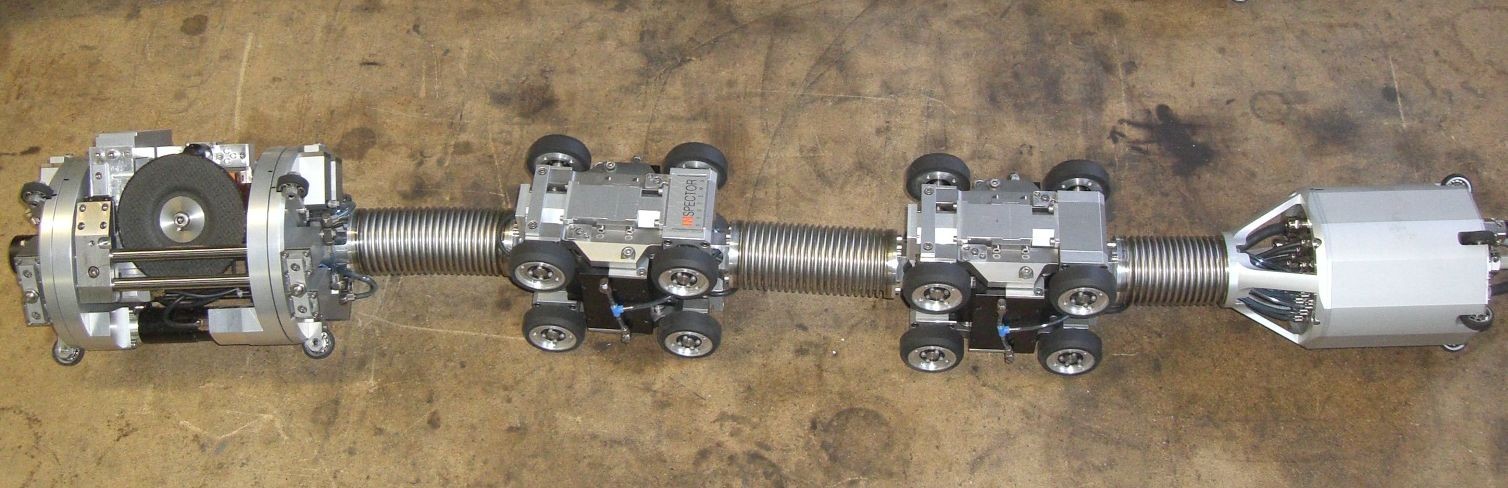
Pipe robot family ready for the construction of a new nuclear power station in Olkiluoto, Finland. The third block of the Olkiluoto nuclear power station is under construction on the island of Okiluioto in the Gulf of Bothnia on the west coast of Finland. As the project leader, AREVA NP together with Siemens will hand over the turnkey European Pressurised Reactors (EPR) with an output of 1600 MW to TVO.
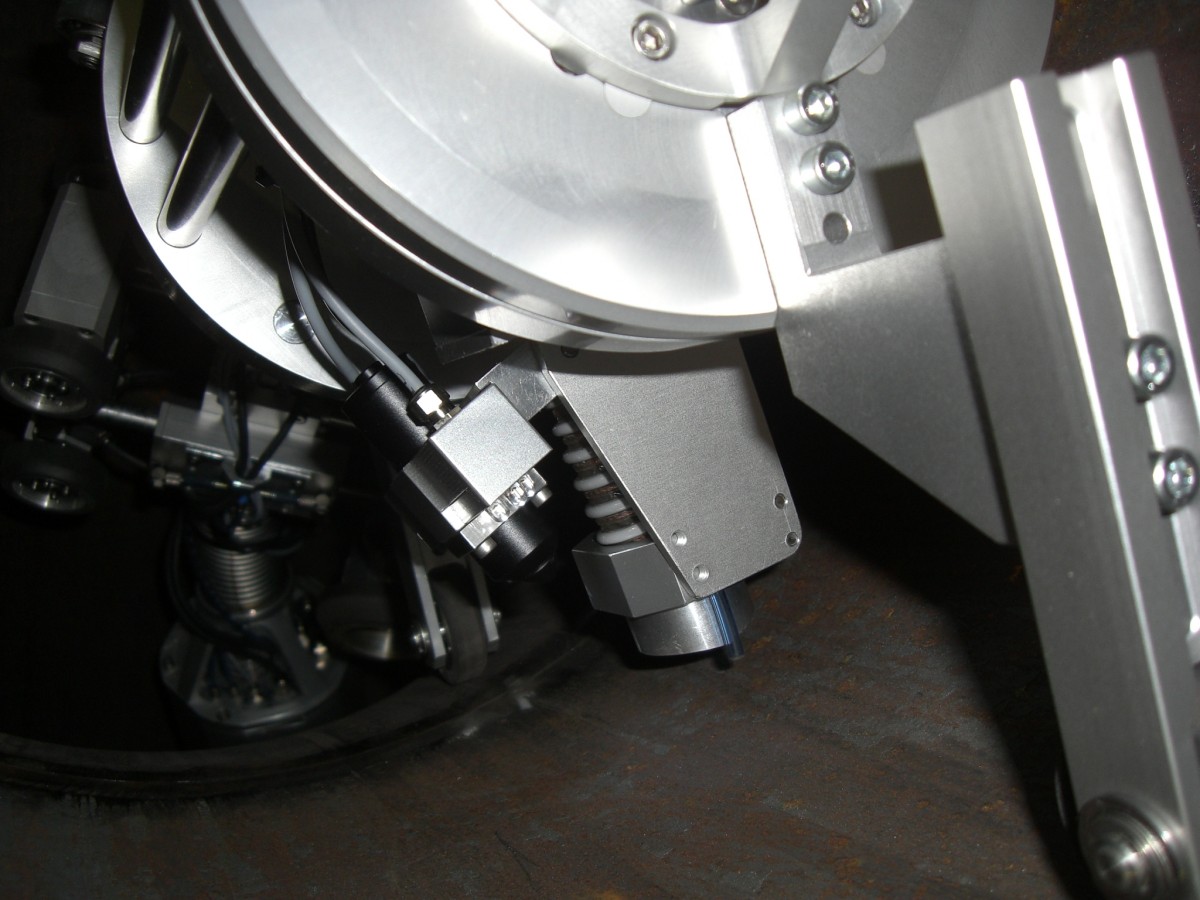
INSPECTOR SYSTEMS was commissioned by BHR to grind the various safety-relevant welding seams of the pipelines system in the primary circuit from inside and then remove the grinding dust. Through specific grinding of the internal weld roots the quality of the pipe is increased and inspection of the welding seams during recurring tests enormously facilitated. In total more than one hundred and thirty welding seams have to be dealt with during the assembly of the pipelines.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
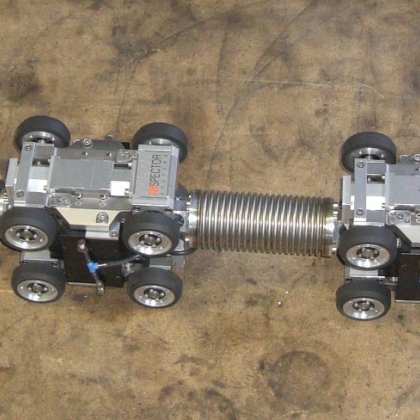
The pipes to be ground have a diameter of DN 100 to DN500 mm, and to cover this diameter range INSPECTOR SYSTEMS has developed five special grinding robots and two suction units. Particularly in this sensitive circuit the welding seams have to meet high requirements with regard to the precision and roughness of the internal surface. Once again INSPECTOR SYSTEMS’ many years of competence in this field have resulted in a practice-orientated solution.
Among other things, a robot had to be developed which had to provide the necessary performance to grind the welds in spite of the minimal amount of space available. The result was INSPECTOR SYSTEMS’ smallest grinding robot to date with a grinding motor specially adapted to this application. This robot is used in the DN100 pipe sections which have an internal diameter of just 86 mm.
With this grinding robot, as well all the other types, bends and vertical pipe sections can be traversed.
In the case of the grinding robot used for the DN150 pipe section the standard grinding motor could also not be used due to the spatial constraints. A new grinding motor therefore had to be developed for this diameter range too, and, in addition, space-saving motor positioning was implemented for this robot.
The two structurally identical grinding robots for the diameter range from DN200 to DN300 are fitted with mechanically adjustable motor positioning in order to cover the large diameter range. Added to this is the tried and tested design with a powerful grinding motor and the fact that the robots are designed to operate through bends and have the ability to climb gradients.
Also tricky were the nominal widths of DN 500 as the robot has to be placed in the pipeline through a valve. The valve bottleneck has a diameter of approx. 300 mm while the pipe to be worked on has an internal diameter of approx. 450 mm. This difference in diameter required a grinding robot design with variable telescopic cylinders for the tensioning/centring unit and stable two-stage motor positioning.
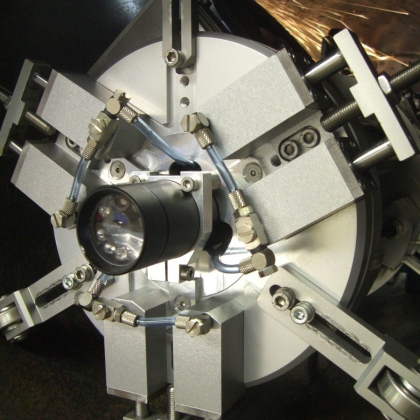
The suction units are based on the same principle as the grinding robots. The suction hose is connected with the motor radial positioning so that it is possible to specifically approach every point in the pipe and apply suction.
Four of the five grinding robots and one of the suction units were successfully approved in 2009. The certification of the remaining two robots was completed at the start of 2010. Their deployment at the construction site on the west coast of Finland is planned for middle of 2010.