
During the MAKRO research project a prototype, multi-segmented and cable free robot platform was developed which made it possible for hard to reach waste water systems to be robotically maintained. The project was partial sponsored by the German Ministry for Research and Development BMBF.


{kind=link}
{kind=link}
{kind=link}
The Aims of the Project
Traditional and well practiced methods of sewer inspection are laborious and are inhibited due to the need for a cable connection. MAKRO plussimplifies maintenance thanks to its unique autonomy ( it doesn't need a cable connection ) and, at the same time, allows the use of an increased number of inspection and testing capabilities. The MAKRO plus prototype was tested in the waste water system of the city of Siegburg under real operational conditions.
Robot mechanic
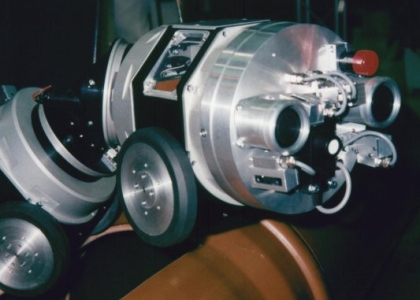
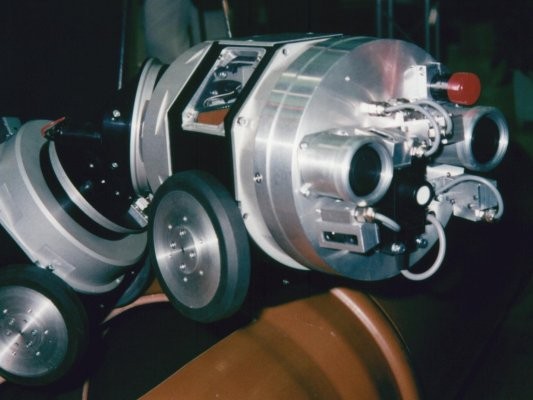
MAKRO plus is an exceptionally maneuverable service robot, which literally snakes through pipe systems with its flexible body. The body segments contain two battery packs to supply energy, a PC 104 computer, two head modules ( MAKRO plus is symmetrically built ) and two docking stations for operational elements. The PC 104 module allows the robot to maneuver itself. The ball joint module has three degrees of variance and is located between the drive units. Sharp bends and branch pipes can be easily navigated as well as steps and other obstacles.
The Electronics
The highly integrated electronics use digital signal processors to control the motor and to make accurate angle calculations. The robot's interior communications are energy saving thanks to the I²C-Bus. Both the robot platform and the operational module have their own CAN-Bus. Camera pictures are transmitted to the PC 104 computer over a Firewire connection. Communications to the MAKRO plus, when it is in the pipe shaft, take place over a WLAN connection. After the robot has traveled a few meters past the entry shaft the WLAN signal breaks up and MAKRO plus operates fully autonomously.
Mission Planning and Execution
Using data from the sewer system registry a mission for the robot can be drawn up that is compiled of a list of inspection duties. Planning software then calculates the route that is to be traveled. The PC104 computer, which controls the robot, navigates the pipe system and discovers obstacles with the help of laser and infrared sensors in the head modules. If an obstacle cannot be overcome, the position is recorded and a new route plan is calculated to complete the remaining inspection duties.
Operations Modules
MAKRO plus, is an autonomous service robot that can be used for a whole range of specific duties within a canalization system. A chemistry module measures pH levels, conductivity, O2 and temperature of waste water with the help of a sample probe. When required, samples can be retrieved by the robot for further analysis in a laboratory. A navigation module which can record speed and three fiber optic gyroscopes measure the gradient and direction of the pipes in a canalization system. This helps to support the success of the mission and it is also provides a useful and accurate update for the land registry records. By applying new operations modules to the robot, MAKRO plus can be used for more and more diverse applications.