
As a company, our strength lies in the ability to solve the individual problems of our customers by building robots to suit their specific needs. INSPECTOR SYSTEMS specializes in manufacturing robots for the inspection and maintenance of the interior of pipe systems. As you would expect, these robots can also be developed and made with the particular needs of a customer in mind. In this way we continue to produce totally new machinery, which is perfect for use in a whole variety of situations.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
An example: Ultrasonic / Eddy Current Inspection Robots
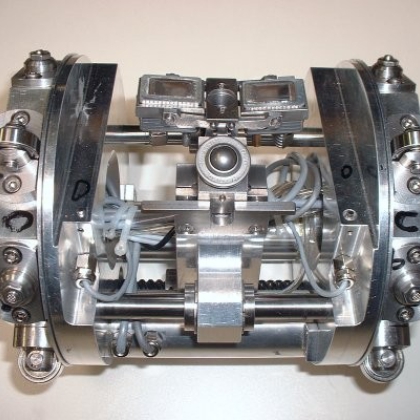
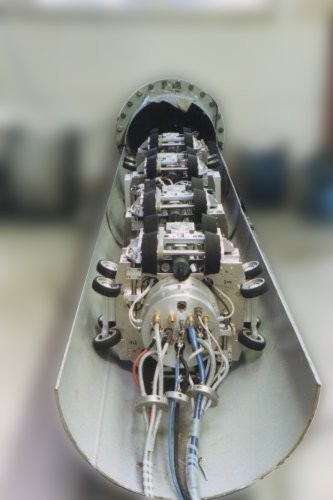
The ultrasonic and eddy current inspection robots have been developed especially for carrying out inspections on welding seams with in the pipe systems of nuclear power plants.
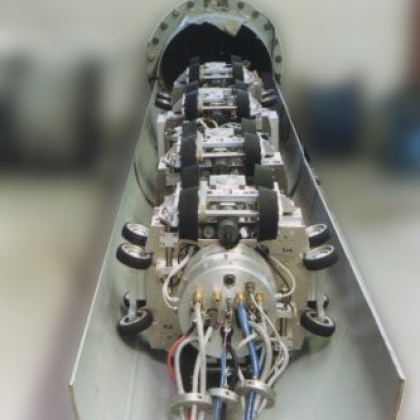
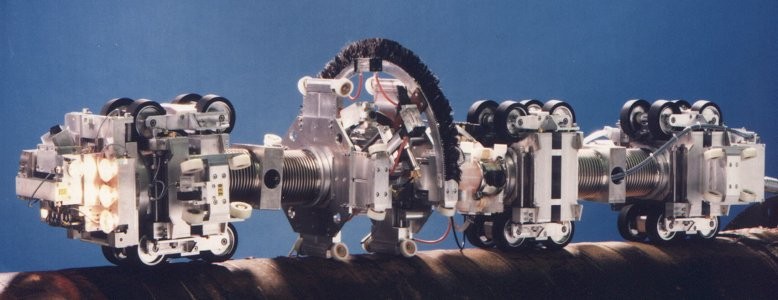
In the main, these crawlers are constructed of the following: one inspection module, one drive unit and one end unit, which holds the control and pneumatic components.
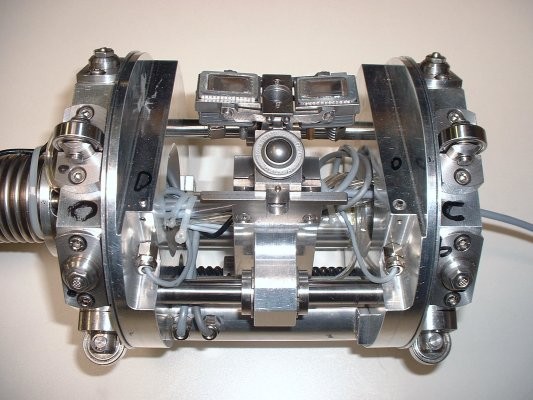
The UT / ET inspection module has been so designed that it sits stably between two rotating flanges and is connected to the control elements. It is made up of a sensor arm with a pneumatic stroke allowing for radial movement of the ultrasonic and eddy current sensors. The inspection module also possesses a rotation unit, which includes positioning functions such as centering, and an adjustable axle, which simplifies movement inside the pipe.
Furthermore, the inspection module also has a front camera that provides a frontal view within the pipe system.
Eddy current and ultrasonic inspection techniques have been developed by INSPECTOR SYSTEMS in conjunction with Kontrolltechnik and Atus.
The drive unit, which is attached to the UT / ET inspection module with a flexible folding bellows construction, provides transport for the inspection module inside of the pipe system. This means that pipe networks, which include bends, can be inspected. The high degree of maneuverability of the entire system means that it can be deployed through an open gate valve.
An example: The Multifunction Robot
The multifunction robot has been developed especially for the application of protective coatings within cool water pipe systems.
In one instance we developed a multifunction robot which was made up of the following elements: an inspection camera, an ultrasonic module for measuring pipe wall thickness, a grinding element, a welding element, a module for spraying epoxy resin all on one single robot. The individual functions of the multifunction robot are controlled remotely.
An example: An Inspection Robot for Rubber Coated Pipes
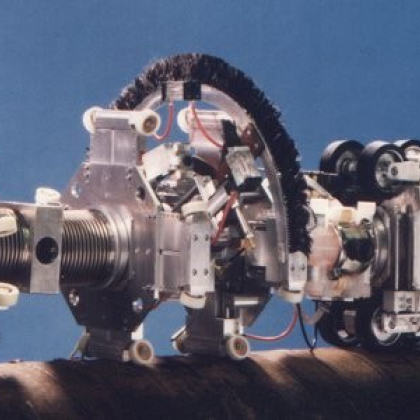
The inspection robot for use in rubber coated or vulcanized pipes was especially developed to detect damage and tears to the rubber interior surface of pipe systems.
It is made up of three drive units and one inspection module in the middle of the robot for measuring electrical conductivity. The inspection module itself is made up of a special 'brush' to which high voltages can be applied.
When the robot comes across a damaged area, the electrical energy passes through the broken rubber coating to the wall of the steel pipe. The extent of the damage can then be calculated.