
Ultrasonic Inspection Robots from INSPECTOR SYSTEMS have been specially developed for making detailed measurements of the thickness of pipe walls using ultrasonic techniques.
These robots are especially suitable for use in pipes laid under the ground and pipes with long vertical inclines.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
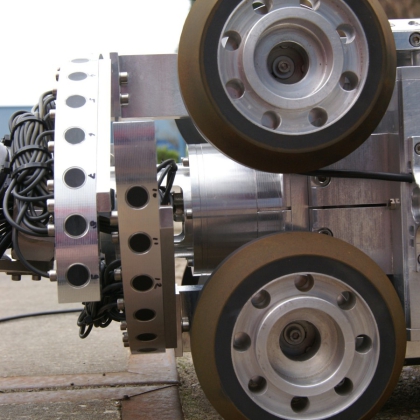
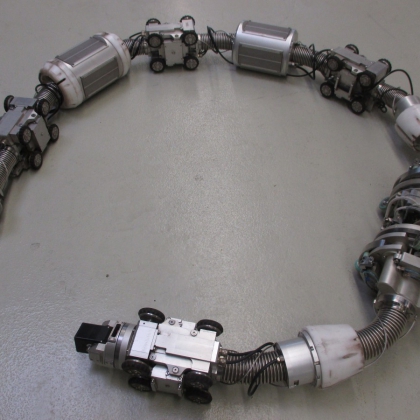
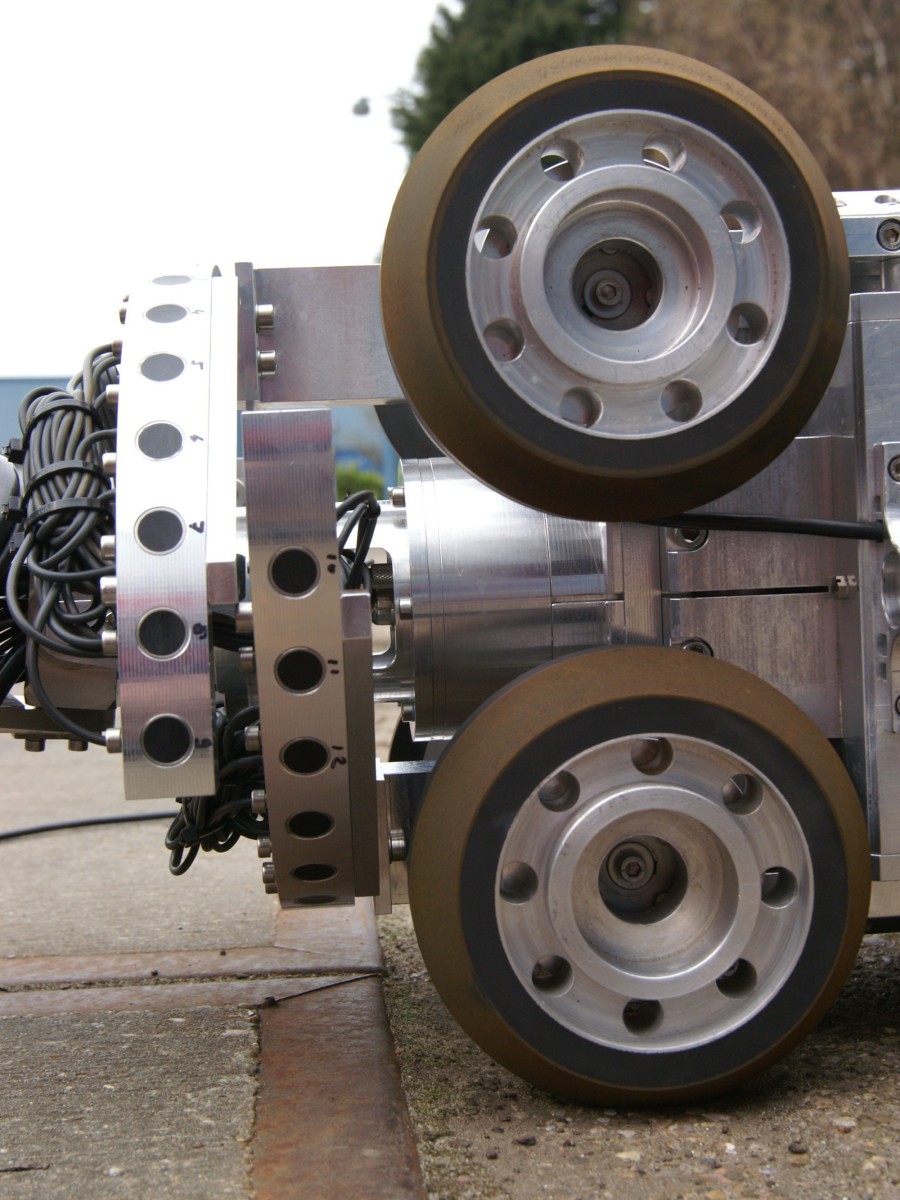
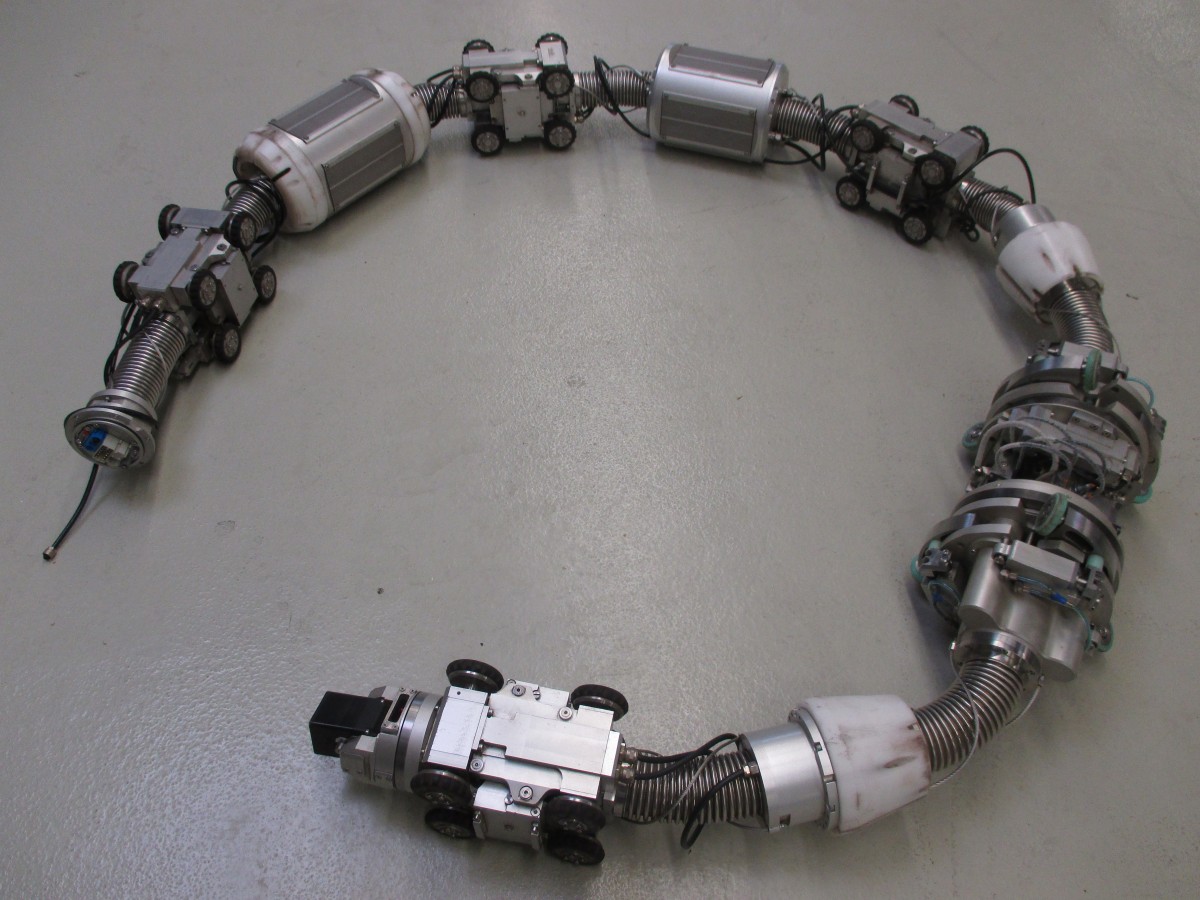
The robots are made up of three drive elements which are connected together using flexible folding bellows and of course, one ultrasonic module.
The robots are able to travel both horizontal and vertical sections of pipe with a speed of 200 m/h. Even bends and turns with a diameter of 1.5 D are no obstacle.
Due to their self-propelled construction, the robots don't need to be pushed through the piping. This means they are free to inspect every point along a section of pipe. Data gathered from ultrasonic is immediately available for viewing on-line.
The Ultrasonic Inspection Robot is connected to its control unit via a rip proof glass fiber cable. Thanks to the smooth surface of the cable, large sections of pipe of several hundred meters in length and pipe systems containing many bends and vertical sections can be inspected. The cable also transmits control commands as well as ultrasonic and picture data.
The actual ultrasonic element consists of a rotating ultrasonic sensor for measuring pipe wall thickness as well as a camera and a positioning unit.
The ultrasonic inspection head is designed to either transmit the ultrasonic beam through water filled pipes into the pipe wall (the UT probes do not contact the inner pipe wall in this case) or as a second possibility the ultrasonic inspection probes are pressed against the inner wall of the pipe (the UT probes are in contact with the inner pipe wall in this case).
A flow chamber made of an extremely low-friction plastic material which is filled with water and equipped with a separate water inlet ensures a constant distance and the connection of the ultrasound to the inner wall of the pipe. This means that with this technology unfilled pipelines can also be inspected.
The ultrasonic signals are converted by the robot's sensitive converter found in the electronics module. The signal is then sent fiber optically so that data won't be lost.
Also found in the electronics module is a pulsar or pre-amp unit for the ultrasonic sensor.
The ultrasonic signal is first digitalized, then analyzed, then presented for viewing by a sensitive ultrasonic card in the PC.
The wall thickness data are displayed on a PC with the help of a C- Scan image of all pipe sections.
Tipp: Ultrasonic Inspection Robots from INSPECTOR SYSTEMS for Long Distance Heat Conduits